Yifei Zhou, Andrea Zanette, Jiayi Pan, Sergey Levine and Aviral Kumar
[ UC Berkeley, Google DeepMind ]
运行 2 层强化学习算法以训练多轮对话智能体
要解决的问题
- 当前用于微调 LLM 的 RL 方法大多数集中于单轮对话,它们难以识别那些可能带来长期优势的动作。
- 多轮 RL 需要 online 的交互数据,那么 on-policy 方法(比如 PPO )就会非常昂贵。
- 随着对话轮数增多, token 的数量显著增加,使得 token-level 的算法变得很慢。
- 有人提出了 utterance-level 的算法,即将一轮对话视为一个 action (而不是一个 token 作为一个 action ),但这样导致了巨大的、 variable-size 的 action space 。
基本思想
- 在 utterance-level 采用 off-policy 训练 Q-model 和 value model 。
- 在 token-level 仍然采用 on-policy 的 policy gradient 算法,且将 1. 中的 Q-model 与 value model 得到的 advantage function 作为 reward。
RL 的主体训练仍在 token-level ,保证了有效的 action space ,同时其使用的 reward 来自 utterance-level ,提高了智能体的长期规划能力,而不再像传统的 token-level 算法那样做的只是 next token prediction 。
MDP 定义
在 utterance-level ,动作 $a_t$ 定义为一段完整的话(即一串 tokens ),状态 $s_t$ 定义为交互历史。
在 token-level ,上述 $a_t$ 中的每个 token 都是一个动作 $a_t^h$ ,状态 $s_t$ 则定义为过往的交互历史 $s_c$ ,加上这段话已经输出的部分 $a_t^{1:h-1}$ 。记策略为 $\pi_{\phi}$ 。
Utterance-level 算法
这个层次的算法应当做到 sample-efficient ,因此它使用 token-level 策略 $\pi_{\phi}$ 收集的 replay 数据。
使用 TD 算法来训练 Q-model $Q_{\theta}^{\pi}(s,a)$ 和 value model $V_{\psi}^{\pi}(s)$ ,因此还有一个 target Q-model $Q_{\bar{\theta}}^{\pi}(s,a)$ 和一个 target value model $V_{\bar{\psi}}^{\pi}(s)$。
训练 Q-model 时,将 $V_{\bar{\psi}}^{\pi}(s)$ 作为 target ,基于 Bellman equation ,目标函数如下:

这里 $s’$ 是 next state 。
训练 value model 时,将 $Q_{\bar{\theta}}^{\pi}(s,a)$ 作为 target ,使 $V_{\psi}^{\pi}(s)$ 尽可能接近前者在所有动作上的期望。目标函数如下:

此外,为了避免对 Q-values 的 overestimation ,采取 double Q-learning 方法,独立地训练两个 Q-model 和 value model 。在计算 advantage function 的时候,使用两个之中的最小值。
实现细节
- 从 replay buffer 中 sample 一组 $(s,a,r,s’)$ 。
- 将 $s,a$ 输入 Q model ,得到 $Q_{\theta}(s,a)$ 。
- 将 $s’$ 输入 target value model ,得到 $V_{\bar{\psi}}(s’)$。
- 结合 $r$ ,即可计算 Q model 的损失函数 $J_Q(\theta)$ 。
- 将 $s$ 输入 value model ,得到 $V_{\psi}(s)$ 。
- 将 $s$ 输入 actor ,得到 $\hat{a}\sim\pi_{\phi}(\cdot\vert s)$ 。
- 将 $s,\hat{a}$ 输入 target Q model ,得到 $Q_{\bar{\theta}}(s,\hat{a})$ 。
- 由此可以计算 value model 的损失函数 $J_V(\psi)$ 。
Token-level 算法
这个层次采取 on-policy 的策略梯度法,只不过 reward 换成了 utterance-level 得到的 advantage function:
\[A^\pi(s_h,a_h)=Q^{\pi}(s_h,a_h)-V^{\pi}(s_h)\]目标函数如下:

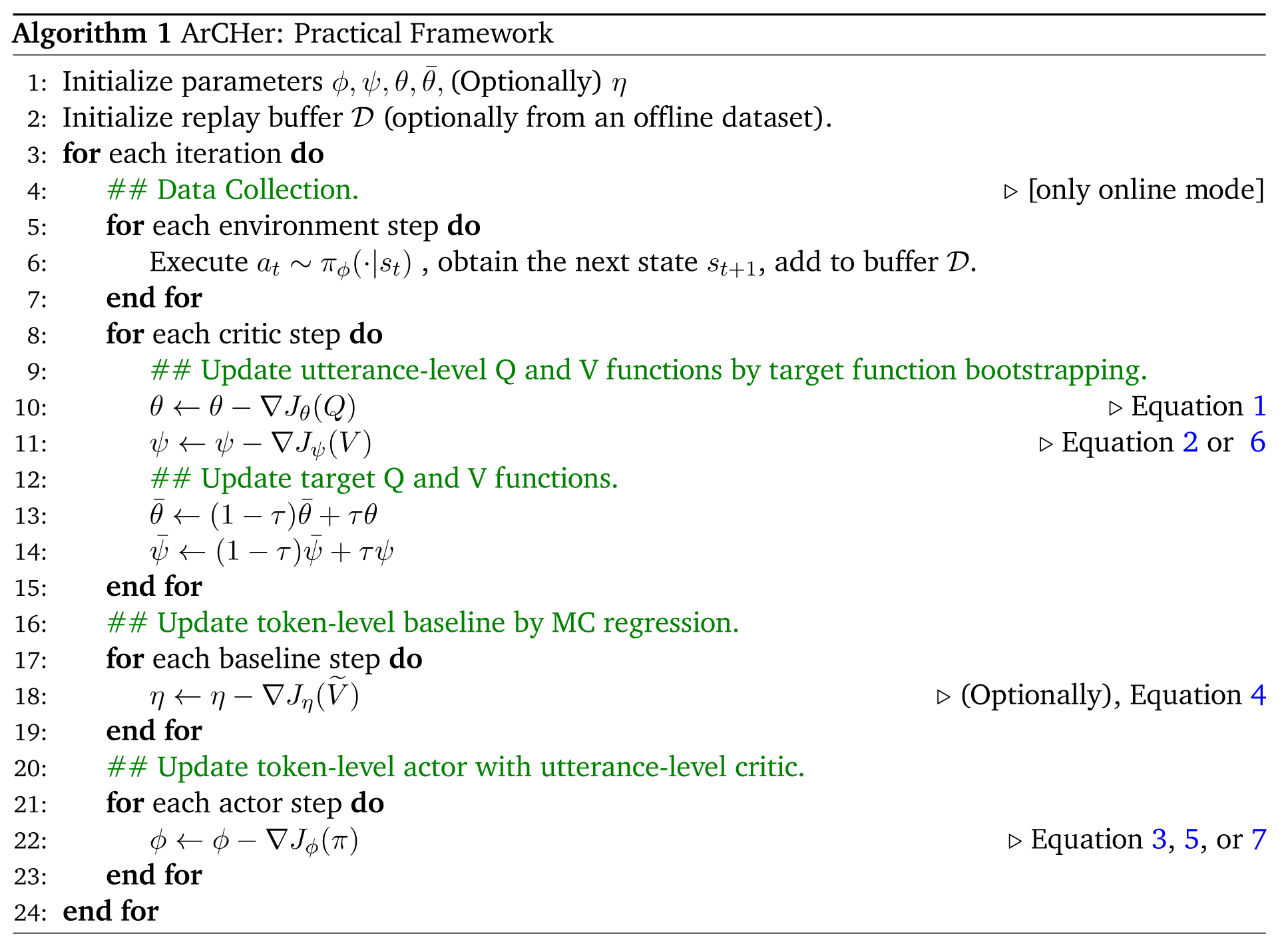
整体算法
- 利用 token-level 的策略 $\pi_{\phi}$ 收集数据。
- 在 utterance-level 训练 critic 。
- 利用 utterance-level 的 critic 来训练 token-level 的 actor 。 算法如下: